afl-fuzz源码分析中篇
[TOC]
前言
- 该部分内容是fuzz大循环前的一小部分内容,具体内容如下
// dry run
perform_dry_run(use_argv);
// 精简队列,这个等到下篇再说
cull_queue();
//ui部分
show_init_stats();
// 若是恢复之前的 fuzz,则找到该从队列的什么位置继续
seek_to = find_start_position();
// 更新 fuzzer_stats 文件
write_stats_file(0, 0, 0);
// 保存 auto extras
save_auto();
if (stop_soon) goto stop_fuzzing;
/* Woop woop woop */
if (!not_on_tty) {
sleep(4);
start_time += 4000;
if (stop_soon) goto stop_fuzzing;
}
- 个人认为很重要的部分如下
perform_dry_run
calibrate_case 重要之重要,校准函数,对每个testcase会跑多遍,必看
init_forkserver 初始化fork server函数,很重要
run_target 重要之重要,也和fork server有关,也是经常用到,必看
classify_counts 给trace_bits分桶
update_bitmap_score 和top_rated更新有关
perform_dry_run
- 对于queue 中的每一个用例,调用 calibrate_case 函数进行校准,根据返回值res进行相应的处理
- perform_dry_run只会跑一次,可以把它当作fuzz之前的一个校准所有testcase的步骤
- 主要流程如下
上述代码对于 queue 中的每一个用例,调用 calibrate_case 函数进行校准。用例会被运行多次(默认是 8 次,这个函数的具体细节我们下文讨论)。对于校准结果:
若 timeout 了,且 -t 参数里面没有容忍超时、也不处于 resume 模式,则直接退出。
若 crash 了,则直接退出(除非有 AFL_SKIP_CRASHES 环境变量)。
若无法执行目标程序,或目标程序没被插桩,则直接退出。
/* Perform dry run of all test cases to confirm that the app is working as
expected. This is done only for the initial inputs, and only once. */
static void perform_dry_run(char** argv) {
struct queue_entry* q = queue;
u32 cal_failures = 0;
u8* skip_crashes = getenv("AFL_SKIP_CRASHES");
//遍历每一个testcase
while (q) {
u8* use_mem;
u8 res;
s32 fd;
u8* fn = strrchr(q->fname, '/') + 1;
ACTF("Attempting dry run with '%s'...", fn);
fd = open(q->fname, O_RDONLY);
if (fd < 0) PFATAL("Unable to open '%s'", q->fname);
use_mem = ck_alloc_nozero(q->len);
//将testcase内容读进use_mem
if (read(fd, use_mem, q->len) != q->len)
FATAL("Short read from '%s'", q->fname);
close(fd);
//校验这个testcase并获取返回值存到res
res = calibrate_case(argv, q, use_mem, 0, 1);
ck_free(use_mem);
if (stop_soon) return;
if (res == crash_mode || res == FAULT_NOBITS)
SAYF(cGRA " len = %u, map size = %u, exec speed = %llu us\n" cRST,
q->len, q->bitmap_size, q->exec_us);
switch (res) {
case FAULT_NONE:
//queue是队列的第一个位置的指针,也就是第一个testcase
// 若 shm 中有超过 100 个 id 被命中过,这其中却没有 >= 32768 的,说明 id 分布非常不均匀
// 此时提醒用户用最新的 AFL 重新编译目标程序
if (q == queue) check_map_coverage();
// crash exploration 模式,但是却没 crash
if (crash_mode) FATAL("Test case '%s' does *NOT* crash", fn);
break;
case FAULT_TMOUT:
if (timeout_given) {
/* The -t nn+ syntax in the command line sets timeout_given to '2' and
instructs afl-fuzz to tolerate but skip queue entries that time
out. */
// 若 argv 中,时间限制参数是 -t nn+,或 resume 模式,则容忍超时
if (timeout_given > 1) {
WARNF("Test case results in a timeout (skipping)");
q->cal_failed = CAL_CHANCES;
cal_failures++;
break;
}
SAYF("\n" cLRD "[-] " cRST
"The program took more than %u ms to process one of the initial test cases.\n"
" Usually, the right thing to do is to relax the -t option - or to delete it\n"
" altogether and allow the fuzzer to auto-calibrate. That said, if you know\n"
" what you are doing and want to simply skip the unruly test cases, append\n"
" '+' at the end of the value passed to -t ('-t %u+').\n", exec_tmout,
exec_tmout);
FATAL("Test case '%s' results in a timeout", fn);
} else {
SAYF("\n" cLRD "[-] " cRST
"The program took more than %u ms to process one of the initial test cases.\n"
" This is bad news; raising the limit with the -t option is possible, but\n"
" will probably make the fuzzing process extremely slow.\n\n"
" If this test case is just a fluke, the other option is to just avoid it\n"
" altogether, and find one that is less of a CPU hog.\n", exec_tmout);
FATAL("Test case '%s' results in a timeout", fn);
}
//发生了crash
case FAULT_CRASH:
if (crash_mode) break;
if (skip_crashes) {
WARNF("Test case results in a crash (skipping)");
q->cal_failed = CAL_CHANCES;
cal_failures++;
break;
}
if (mem_limit) {
SAYF("\n" cLRD "[-] " cRST
"Oops, the program crashed with one of the test cases provided. There are\n"
" several possible explanations:\n\n"
" - The test case causes known crashes under normal working conditions. If\n"
" so, please remove it. The fuzzer should be seeded with interesting\n"
" inputs - but not ones that cause an outright crash.\n\n"
" - The current memory limit (%s) is too low for this program, causing\n"
" it to die due to OOM when parsing valid files. To fix this, try\n"
" bumping it up with the -m setting in the command line. If in doubt,\n"
" try something along the lines of:\n\n"
#ifdef RLIMIT_AS
" ( ulimit -Sv $[%llu << 10]; /path/to/binary [...] <testcase )\n\n"
#else
" ( ulimit -Sd $[%llu << 10]; /path/to/binary [...] <testcase )\n\n"
#endif /* ^RLIMIT_AS */
" Tip: you can use http://jwilk.net/software/recidivm to quickly\n"
" estimate the required amount of virtual memory for the binary. Also,\n"
" if you are using ASAN, see %s/notes_for_asan.txt.\n\n"
#ifdef __APPLE__
" - On MacOS X, the semantics of fork() syscalls are non-standard and may\n"
" break afl-fuzz performance optimizations when running platform-specific\n"
" binaries. To fix this, set AFL_NO_FORKSRV=1 in the environment.\n\n"
#endif /* __APPLE__ */
" - Least likely, there is a horrible bug in the fuzzer. If other options\n"
" fail, poke <lcamtuf@coredump.cx> for troubleshooting tips.\n",
DMS(mem_limit << 20), mem_limit - 1, doc_path);
} else {
SAYF("\n" cLRD "[-] " cRST
"Oops, the program crashed with one of the test cases provided. There are\n"
" several possible explanations:\n\n"
" - The test case causes known crashes under normal working conditions. If\n"
" so, please remove it. The fuzzer should be seeded with interesting\n"
" inputs - but not ones that cause an outright crash.\n\n"
#ifdef __APPLE__
" - On MacOS X, the semantics of fork() syscalls are non-standard and may\n"
" break afl-fuzz performance optimizations when running platform-specific\n"
" binaries. To fix this, set AFL_NO_FORKSRV=1 in the environment.\n\n"
#endif /* __APPLE__ */
" - Least likely, there is a horrible bug in the fuzzer. If other options\n"
" fail, poke <lcamtuf@coredump.cx> for troubleshooting tips.\n");
}
FATAL("Test case '%s' results in a crash", fn);
//检测到无法执行文件
case FAULT_ERROR:
FATAL("Unable to execute target application ('%s')", argv[0]);
//检测到没有插桩
case FAULT_NOINST:
FATAL("No instrumentation detected");
//没有新的发现
case FAULT_NOBITS:
//Number of useless starting paths,最开始的testcase的queue中没有用的数量
useless_at_start++;
if (!in_bitmap && !shuffle_queue)
WARNF("No new instrumentation output, test case may be useless.");
break;
}
if (q->var_behavior) WARNF("Instrumentation output varies across runs.");
q = q->next;
}
//比较校验失败的数量和总的testcase的数量
if (cal_failures) {
if (cal_failures == queued_paths)
FATAL("All test cases time out%s, giving up!",
skip_crashes ? " or crash" : "");
WARNF("Skipped %u test cases (%0.02f%%) due to timeouts%s.", cal_failures,
((double)cal_failures) * 100 / queued_paths,
skip_crashes ? " or crashes" : "");
if (cal_failures * 5 > queued_paths)
WARNF(cLRD "High percentage of rejected test cases, check settings!");
}
OKF("All test cases processed.");
}
calibrate_case
- calibrate_case 函数的运行时机至少有两个:一是程序运行之初,用于校准初始 corpus;二是发现了新路径,将有趣的用例加入 queue 时。总之进了 queue 的用例,都要被运行一遍calibrate_case 函数
- 总体流程如下
可见,校准过程是多次运行用例(默认是 8 次),统计各次运行的结果。
若 fork server 没有准备好,就调用 init_forkserver() 初始化 fork server
多次调用 run_target() 运行目标程序,观察结果。若没有任何 hit count 命中,则认为程序未插桩,报告错误。
如果发现对某用例多次运行程序,其表现不一致,则将执行次数提升到 40 次,并更新 var_bytes[] (这个全局变量表示 shm 中哪些位置存在不一致性)。另外,将 queue entry 的 var_behavior 标记设为 1。
更新 queue entry 信息,例如将 exec_us 字段设为校准过程中的执行时间均值。
给这个用例打分,并更新 top_rated 指针数组。
res = calibrate_case(argv, q, use_mem, 0, 1);
static u8 calibrate_case(char** argv, struct queue_entry* q, u8* use_mem,
u32 handicap, u8 from_queue) {
static u8 first_trace[MAP_SIZE];
//存储run_target结果 new_bits记录 have_new_bits函数更大的返回值 是否有variable特性 have_new_bits
u8 fault = 0, new_bits = 0, var_detected = 0, hnb = 0,
//是否是第一次跑
first_run = (q->exec_cksum == 0);
u64 start_us, stop_us;
s32 old_sc = stage_cur, old_sm = stage_max;
u32 use_tmout = exec_tmout;
u8* old_sn = stage_name;
/* Be a bit more generous about timeouts when resuming sessions, or when
trying to calibrate already-added finds. This helps avoid trouble due
to intermittent latency. */
//若是 resume 先前的 fuzz 过程,或这个用例并非初始 corpus,则多容忍一点超时
if (!from_queue || resuming_fuzz)
use_tmout = MAX(exec_tmout + CAL_TMOUT_ADD,
exec_tmout * CAL_TMOUT_PERC / 100);
q->cal_failed++;
stage_name = "calibration";
stage_max = fast_cal ? 3 : CAL_CYCLES;
/* Make sure the forkserver is up before we do anything, and let's not
count its spin-up time toward binary calibration. */
// 如果 fork server 没有准备好,就初始化 fork server
if (dumb_mode != 1 && !no_forkserver && !forksrv_pid)
init_forkserver(argv);
if (q->exec_cksum) {
// 若已经有过 checksum,则将 trace_bits 备份到局部静态变量 first_trace(因为 trace_bits 马上就要被改掉了)
memcpy(first_trace, trace_bits, MAP_SIZE);
hnb = has_new_bits(virgin_bits);
if (hnb > new_bits) new_bits = hnb;
}
start_us = get_cur_time_us();
// 多次执行用例
for (stage_cur = 0; stage_cur < stage_max; stage_cur++) {
u32 cksum;
if (!first_run && !(stage_cur % stats_update_freq)) show_stats();
// 把用例写入target文件
write_to_testcase(use_mem, q->len);
// 运行目标程序
fault = run_target(argv, use_tmout);
/* stop_soon is set by the handler for Ctrl+C. When it's pressed,
we want to bail out quickly. */
if (stop_soon || fault != crash_mode) goto abort_calibration;
// shm 没有命中记录,说明没插桩
if (!dumb_mode && !stage_cur && !count_bytes(trace_bits)) {
fault = FAULT_NOINST;
goto abort_calibration;
}
// 计算本次执行路径的消息摘要
cksum = hash32(trace_bits, MAP_SIZE, HASH_CONST);
// 有两种情况,要么这个用例从未执行过,要么这个用例多次执行的表现不一致
if (q->exec_cksum != cksum) {
// 更新 virgin_bits
hnb = has_new_bits(virgin_bits);
if (hnb > new_bits) new_bits = hnb;
// q->exec_cksum不为0,则这个用例以前执行过,且这次执行与以前表现不一致
if (q->exec_cksum) {
u32 i;
for (i = 0; i < MAP_SIZE; i++) {
// 记录不一致的 hit count 位置,并把本用例的执行次数提升到 40 次
if (!var_bytes[i] && first_trace[i] != trace_bits[i]) {
var_bytes[i] = 1;
stage_max = CAL_CYCLES_LONG;
}
}
var_detected = 1;
} else {
// 这是该用例首次执行,记录 checksum 到 q->exec_cksum 中 ,同时将trace_bits复制到first_trace中
q->exec_cksum = cksum;
memcpy(first_trace, trace_bits, MAP_SIZE);
}
}
}
stop_us = get_cur_time_us();
total_cal_us += stop_us - start_us;
total_cal_cycles += stage_max;
/* OK, let's collect some stats about the performance of this test case.
This is used for fuzzing air time calculations in calculate_score(). */
// 更新 queue entry 信息
q->exec_us = (stop_us - start_us) / stage_max;
q->bitmap_size = count_bytes(trace_bits);
q->handicap = handicap;
q->cal_failed = 0;
total_bitmap_size += q->bitmap_size;
total_bitmap_entries++;
// 给这个用例打分,并更新 top_rated 指针数组
update_bitmap_score(q);
/* If this case didn't result in new output from the instrumentation, tell
parent. This is a non-critical problem, but something to warn the user
about. */
// 如果这个用例没有产生新的本质不同的路径,则报告用户
if (!dumb_mode && first_run && !fault && !new_bits) fault = FAULT_NOBITS;
abort_calibration:
// 若发现了新的边,更新一些信息
if (new_bits == 2 && !q->has_new_cov) {
q->has_new_cov = 1;
queued_with_cov++;
}
/* Mark variable paths. */
if (var_detected) {
// 若该用例多次运行的行为不一致,统计有多少个位置的 hit count 不一致
var_byte_count = count_bytes(var_bytes);
// 将这个 queue entry 标记为 var_behavior
if (!q->var_behavior) {
mark_as_variable(q);
queued_variable++;
}
}
// 退出 calibration 模式,恢复现场
stage_name = old_sn;
stage_cur = old_sc;
stage_max = old_sm;
//ui
if (!first_run) show_stats();
return fault;
}
init_forkserver
- 总体流程如图所示

- 父进程是afl-fuzz本身,子进程是被fuzz的target程序,也即是fork server
- 子进程的任务
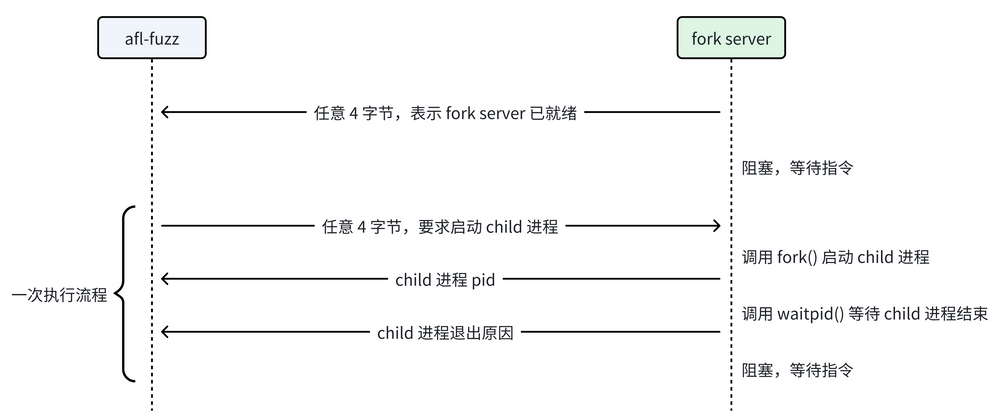
可见,子进程做的事情是:
把内存大小限制为 50MB、把 core dump 大小上限设为 0。
创建一个新的进程组。
关掉不用的 fd。
若目标程序从 stdin 读入,则重定向到用例文件。
把 fd 198 重定向到接收 supervisor 发来消息的管道、把 fd 199 重定向到往 supervisor 回复信息的管道。
如果用户没有给出 ASan 和 MSan 的选项,则指定为默认值。
执行目标程序。目标程序会在第一个入口点停下来,往 fd 199 写四个字节内容。由于发送成功,目标程序会担任 fork server,等待 supervisor 发来的指令。
总之:子进程收拾一下现场,维护通讯管道,然后把自己 execv 成 fork server
- 父进程的任务
父进程会等待 fork server 发来 4字节内容,若接收成功,则 fork server 成功启动,初始化完成;否则做一点错误处理
EXP_ST void init_forkserver(char** argv) {
static struct itimerval it;
int st_pipe[2], ctl_pipe[2];
int status;
s32 rlen;
ACTF("Spinning up the fork server...");
// 写入 st_pipe[1] 的内容可以在 st_pipe[0] 读到。这个管道用于 fd 199,是 fork server -> supervisor 方向
// 写入 ctl_pipe[1] 的内容可以在 ctl_pipe[0] 读到。这个管道用于 fd 198,是 supervisor -> fork server 方向
if (pipe(st_pipe) || pipe(ctl_pipe)) PFATAL("pipe() failed");
forksrv_pid = fork();
if (forksrv_pid < 0) PFATAL("fork() failed");
//******************************************子进程******************************************
if (!forksrv_pid) {
struct rlimit r;
/* Umpf. On OpenBSD, the default fd limit for root users is set to
soft 128. Let's try to fix that... */
if (!getrlimit(RLIMIT_NOFILE, &r) && r.rlim_cur < FORKSRV_FD + 2) {
r.rlim_cur = FORKSRV_FD + 2;
setrlimit(RLIMIT_NOFILE, &r); /* Ignore errors */
}
if (mem_limit) {
r.rlim_max = r.rlim_cur = ((rlim_t)mem_limit) << 20;
setrlimit(RLIMIT_DATA, &r); /* Ignore errors */
}
/* Dumping cores is slow and can lead to anomalies if SIGKILL is delivered
before the dump is complete. */
r.rlim_max = r.rlim_cur = 0;
setrlimit(RLIMIT_CORE, &r); /* Ignore errors */
/* Isolate the process and configure standard descriptors. If out_file is
specified, stdin is /dev/null; otherwise, out_fd is cloned instead. */
setsid();
dup2(dev_null_fd, 1);
dup2(dev_null_fd, 2);
if (out_file) {
dup2(dev_null_fd, 0);
} else {
dup2(out_fd, 0);
close(out_fd);
}
/* Set up control and status pipes, close the unneeded original fds. */
// fork server 写 st_pipe[1]、读 ctl_pipe[0]
// 将 fd 198 重定向到 ctl_pipe[0] 以接收 supervisor 指令
// 将 fd 199 重定向到 st_pipe[1] 以向 supervisor 发送回复
if (dup2(ctl_pipe[0], FORKSRV_FD) < 0) PFATAL("dup2() failed");
if (dup2(st_pipe[1], FORKSRV_FD + 1) < 0) PFATAL("dup2() failed");
close(ctl_pipe[0]);
close(ctl_pipe[1]);
close(st_pipe[0]);
close(st_pipe[1]);
close(out_dir_fd);
close(dev_null_fd);
close(dev_urandom_fd);
close(fileno(plot_file));
//处理环境变量,此处略
/*
...
*/
// 执行目标程序。它会在第一个入口点停下来,给 supervisor 发送 4 字节内容,并等待指令
execv(target_path, argv);
/* Use a distinctive bitmap signature to tell the parent about execv()
falling through. */
*(u32*)trace_bits = EXEC_FAIL_SIG;
exit(0);
}
//*****************************************父进程******************************************
/* Close the unneeded endpoints. */
// supervisor 读 st_pipe[0]、写 ctl_pipe[1]
close(ctl_pipe[0]);
close(st_pipe[1]);
fsrv_ctl_fd = ctl_pipe[1];
fsrv_st_fd = st_pipe[0];
/* Wait for the fork server to come up, but don't wait too long. */
// 设置定时器,等待 fork server 发来 4 字节
it.it_value.tv_sec = ((exec_tmout * FORK_WAIT_MULT) / 1000);
it.it_value.tv_usec = ((exec_tmout * FORK_WAIT_MULT) % 1000) * 1000;
setitimer(ITIMER_REAL, &it, NULL);
// 注意 read 是阻塞的,会等到 fork server 发来 4字节 或者超时为止
rlen = read(fsrv_st_fd, &status, 4);
it.it_value.tv_sec = 0;
it.it_value.tv_usec = 0;
setitimer(ITIMER_REAL, &it, NULL);
/* If we have a four-byte "hello" message from the server, we're all set.
Otherwise, try to figure out what went wrong. */
// 读到 4 个字节,说明 fork server 成功启动
if (rlen == 4) {
OKF("All right - fork server is up.");
return;
}
//以下为错误处理,略
/*
...
*/
}
setsid函数
setsid() 是一个用于创建新会话和进程组的系统调用函数。它主要用于以下目的:
创建新会话: 调用setsid()的进程成为一个新会话的会话首领。新会话与调用进程原来所属的会话完全独立。
创建新进程组: 调用setsid()的进程成为新进程组的组长。新进程组的ID与调用setsid()的进程的进程ID(PID)相同。
脱离控制终端: 如果调用setsid()的进程原来有控制终端,调用setsid()之后,该进程会与原来的控制终端分离,并且新会话不会分配控制终端。此功能常用于后台进程(如守护进程)的创建,以确保它们不再依赖任何终端,并且不会意外地收到来自终端的信号(例如SIGHUP)。
返回值:
成功时,setsid()返回新会话ID(即调用进程的进程ID)。 如果调用进程已经是一个进程组的组长,则setsid()调用失败,并返回-1,errno被设置为EPERM。 常见应用:
setsid()经常用于启动守护进程(Daemon),确保进程独立于终端,并且不会意外地受到终端的控制信号干扰。
在 AFL 中,setsid() 的使用有以下几个目的(由GPT生成):
隔离 fork server 进程:通过调用 setsid(),fork server 进程被隔离在一个新的会话和进程组中,这样可以避免受到原有终端和其他进程组的干扰,确保它独立运行。
防止信号干扰:创建新的会话和进程组后,fork server 进程不会受到来自父进程组的信号(如终端信号或 Ctrl+C),从而提高其稳定性。
避免意外退出:由于 fork server 进程与终端的控制脱钩,它在终端关闭时不会因为 SIGHUP 信号而意外退出。
有关st_pipe[2], ctl_pipe[2]理解
- pipe() 函数用于创建一个无名管道,并返回两个文件描述符,分别指向管道的读端(read end)和写端(write end)。st_pipe[0] 和 ctl_pipe[0] 指向管道的读端,st_pipe[1] 和 ctl_pipe[1] 指向管道的写端
pipe(st_pipe) || pipe(ctl_pipe)
- st_pipe对应199,ctl_pipe对应198
- 可以这样理解,st_pipe就是state_pipe,所以对于supervisor,它只用从st_pipe读取数据获取fork server状态即可,因此引用st_pipe[0]。而对于fork server要向st_pipe写数据,因此要用st_pipe[1]
- 同时ctl_pipe就是control_pipe,所以对于supervisor,它要向fork server传达命令,因此要用ctl_pipe[1]。而对于fork server要获取命令,因为要用ctl_pipe[0]
有关子进程execv(target_path, argv)这个函数的理解
- 在afl-as源码中分析了main payload的内容,有如下部分,这就是fork server要做的事
if ( write(199, &_afl_temp, 4uLL) == 4 )
{
while ( 1 )
{
v12 = 198;
if ( read(198, &_afl_temp, 4uLL) != 4 )
break;
LODWORD(v13) = fork();
if ( v13 < 0 )
break;
if ( !v13 )
goto __afl_fork_resume;
_afl_fork_pid = v13;
write(199, &_afl_fork_pid, 4uLL);
v12 = _afl_fork_pid;
LODWORD(v14) = waitpid(_afl_fork_pid, &_afl_temp, 0);
if ( v14 <= 0 )
break;
write(199, &_afl_temp, 4uLL);
}
_exit(v12);
}
- 向fd=199写入4字节,等待supervisor传达过来的指令
has_new_bits
- 更新 virgin_bits。返回值:1 = 仅 hit count 更新;2 = 出现了新的边
/* Check if the current execution path brings anything new to the table.
Update virgin bits to reflect the finds. Returns 1 if the only change is
the hit-count for a particular tuple; 2 if there are new tuples seen.
Updates the map, so subsequent calls will always return 0.
This function is called after every exec() on a fairly large buffer, so
it needs to be fast. We do this in 32-bit and 64-bit flavors. */
static inline u8 has_new_bits(u8* virgin_map) {
u32* current = (u32*)trace_bits;
u32* virgin = (u32*)virgin_map;
u32 i = (MAP_SIZE >> 2);
u8 ret = 0;
while (i--) {
/* Optimize for (*current & *virgin) == 0 - i.e., no bits in current bitmap
that have not been already cleared from the virgin map - since this will
almost always be the case. */
if (unlikely(*current) && unlikely(*current & *virgin)) {
if (likely(ret < 2)) {
u8* cur = (u8*)current;
u8* vir = (u8*)virgin;
/* Looks like we have not found any new bytes yet; see if any non-zero
bytes in current[] are pristine in virgin[]. */
//只有virgin为\xff才表示这个路径未被探索过,只要这个路径被探索过一次,就说明virgin已经不为\xff
//此时就让ret=1,表示只是hit count增加
if ((cur[0] && vir[0] == 0xff) || (cur[1] && vir[1] == 0xff) ||
(cur[2] && vir[2] == 0xff) || (cur[3] && vir[3] == 0xff)) ret = 2;
else ret = 1;
}
*virgin &= ~*current;
}
current++;
virgin++;
}
if (ret && virgin_map == virgin_bits) bitmap_changed = 1;
return ret;
}
write_to_testcase
- 把testcase内容写进target文件中
/* Write modified data to file for testing. If out_file is set, the old file
is unlinked and a new one is created. Otherwise, out_fd is rewound and
truncated. */
static void write_to_testcase(void* mem, u32 len) {
s32 fd = out_fd;
if (out_file) {
unlink(out_file); /* Ignore errors. */
fd = open(out_file, O_WRONLY | O_CREAT | O_EXCL, 0600);
if (fd < 0) PFATAL("Unable to create '%s'", out_file);
} else lseek(fd, 0, SEEK_SET);
ck_write(fd, mem, len, out_file);
if (!out_file) {
if (ftruncate(fd, len)) PFATAL("ftruncate() failed");
lseek(fd, 0, SEEK_SET);
} else close(fd);
}
run_target
- run_target会把trace_bits清空,但是注意之前已经保存过
if (q->exec_cksum) {
memcpy(first_trace, trace_bits, MAP_SIZE);
hnb = has_new_bits(virgin_bits);
if (hnb > new_bits) new_bits = hnb;
}
- 用dumb_mode跑,或者不用fork server,最后都是子进程在调用execv(target_path, argv); 父进程就waitpid(child_pid, &status, 0)
- 其他情况下
- write(fsrv_ctl_fd, &prev_timed_out, 4) fuzzer向fork server发送命令
- read(fsrv_st_fd, &child_pid, 4) fuzzer从fork server获取child_pid
- read(fsrv_st_fd, &status, 4) fuzzer从fork server获取状态
- 可以看到这个和fork server紧密相关,再来复习一次和fork server相关内容。while(1)除非fork失败否则不会退出,也就是说这个fork server第一次启动后就一直在这个while循环中,然后通过read和write和fuzzer进行阻塞式的交流,然后每次交流后fork出子进程执行hit count的增加任务
if ( write(199, &_afl_temp, 4uLL) == 4 )
{
while ( 1 )
{
v12 = 198;
if ( read(198, &_afl_temp, 4uLL) != 4 )
break;
LODWORD(v13) = fork();
if ( v13 < 0 )
break;
if ( !v13 )
goto __afl_fork_resume;
_afl_fork_pid = v13;
write(199, &_afl_fork_pid, 4uLL);
v12 = _afl_fork_pid;
LODWORD(v14) = waitpid(_afl_fork_pid, &_afl_temp, 0);
if ( v14 <= 0 )
break;
write(199, &_afl_temp, 4uLL);
}
}
/* Execute target application, monitoring for timeouts. Return status
information. The called program will update trace_bits[]. */
static u8 run_target(char** argv, u32 timeout) {
static struct itimerval it;
static u32 prev_timed_out = 0;
static u64 exec_ms = 0;
int status = 0;
u32 tb4;
child_timed_out = 0;
/* After this memset, trace_bits[] are effectively volatile, so we
must prevent any earlier operations from venturing into that
territory. */
memset(trace_bits, 0, MAP_SIZE);
MEM_BARRIER();
/* If we're running in "dumb" mode, we can't rely on the fork server
logic compiled into the target program, so we will just keep calling
execve(). There is a bit of code duplication between here and
init_forkserver(), but c'est la vie. */
//用dumb_mode跑,或者不用fork server
if (dumb_mode == 1 || no_forkserver) {
child_pid = fork();
if (child_pid < 0) PFATAL("fork() failed");
//****************************************子程序********************************************
if (!child_pid) {
struct rlimit r;
if (mem_limit) {
r.rlim_max = r.rlim_cur = ((rlim_t)mem_limit) << 20;
#ifdef RLIMIT_AS
setrlimit(RLIMIT_AS, &r); /* Ignore errors */
#else
setrlimit(RLIMIT_DATA, &r); /* Ignore errors */
#endif /* ^RLIMIT_AS */
}
r.rlim_max = r.rlim_cur = 0;
setrlimit(RLIMIT_CORE, &r); /* Ignore errors */
/* Isolate the process and configure standard descriptors. If out_file is
specified, stdin is /dev/null; otherwise, out_fd is cloned instead. */
setsid();
dup2(dev_null_fd, 1);
dup2(dev_null_fd, 2);
if (out_file) {
dup2(dev_null_fd, 0);
} else {
dup2(out_fd, 0);
close(out_fd);
}
/* On Linux, would be faster to use O_CLOEXEC. Maybe TODO. */
close(dev_null_fd);
close(out_dir_fd);
close(dev_urandom_fd);
close(fileno(plot_file));
/* Set sane defaults for ASAN if nothing else specified. */
setenv("ASAN_OPTIONS", "abort_on_error=1:"
"detect_leaks=0:"
"symbolize=0:"
"allocator_may_return_null=1", 0);
setenv("MSAN_OPTIONS", "exit_code=" STRINGIFY(MSAN_ERROR) ":"
"symbolize=0:"
"msan_track_origins=0", 0);
//这个不和init_forkserver内容一致???
execv(target_path, argv);
/* Use a distinctive bitmap value to tell the parent about execv()
falling through. */
*(u32*)trace_bits = EXEC_FAIL_SIG;
exit(0);
}
} else {
s32 res;
/* In non-dumb mode, we have the fork server up and running, so simply
tell it to have at it, and then read back PID. */
//向fork server发送命令
if ((res = write(fsrv_ctl_fd, &prev_timed_out, 4)) != 4) {
if (stop_soon) return 0;
RPFATAL(res, "Unable to request new process from fork server (OOM?)");
}
//从fork server获取child_pid
if ((res = read(fsrv_st_fd, &child_pid, 4)) != 4) {
if (stop_soon) return 0;
RPFATAL(res, "Unable to request new process from fork server (OOM?)");
}
if (child_pid <= 0) FATAL("Fork server is misbehaving (OOM?)");
}
/* Configure timeout, as requested by user, then wait for child to terminate. */
it.it_value.tv_sec = (timeout / 1000);
it.it_value.tv_usec = (timeout % 1000) * 1000;
setitimer(ITIMER_REAL, &it, NULL);
/* The SIGALRM handler simply kills the child_pid and sets child_timed_out. */
if (dumb_mode == 1 || no_forkserver) {
if (waitpid(child_pid, &status, 0) <= 0) PFATAL("waitpid() failed");
} else {
s32 res;
if ((res = read(fsrv_st_fd, &status, 4)) != 4) {
if (stop_soon) return 0;
RPFATAL(res, "Unable to communicate with fork server (OOM?)");
}
}
if (!WIFSTOPPED(status)) child_pid = 0;
getitimer(ITIMER_REAL, &it);
exec_ms = (u64) timeout - (it.it_value.tv_sec * 1000 +
it.it_value.tv_usec / 1000);
it.it_value.tv_sec = 0;
it.it_value.tv_usec = 0;
setitimer(ITIMER_REAL, &it, NULL);
total_execs++;
/* Any subsequent operations on trace_bits must not be moved by the
compiler below this point. Past this location, trace_bits[] behave
very normally and do not have to be treated as volatile. */
MEM_BARRIER();
tb4 = *(u32*)trace_bits;
classify_counts((u32*)trace_bits);
prev_timed_out = child_timed_out;
//根据子进程的执行情况返回合适的值
/* Report outcome to caller. */
if (WIFSIGNALED(status) && !stop_soon) {
kill_signal = WTERMSIG(status);
if (child_timed_out && kill_signal == SIGKILL) return FAULT_TMOUT;
return FAULT_CRASH;
}
/* A somewhat nasty hack for MSAN, which doesn't support abort_on_error and
must use a special exit code. */
if (uses_asan && WEXITSTATUS(status) == MSAN_ERROR) {
kill_signal = 0;
return FAULT_CRASH;
}
if ((dumb_mode == 1 || no_forkserver) && tb4 == EXEC_FAIL_SIG)
return FAULT_ERROR;
/* It makes sense to account for the slowest units only if the testcase was run
under the user defined timeout. */
if (!(timeout > exec_tmout) && (slowest_exec_ms < exec_ms)) {
slowest_exec_ms = exec_ms;
}
return FAULT_NONE;
}
classify_counts
- 将trace_bits中的内容映射到合适的桶中
static inline void classify_counts(u32* mem) {
u32 i = MAP_SIZE >> 2;
while (i--) {
/* Optimize for sparse bitmaps. */
if (unlikely(*mem)) {
u16* mem16 = (u16*)mem;
mem16[0] = count_class_lookup16[mem16[0]];
mem16[1] = count_class_lookup16[mem16[1]];
}
mem++;
}
}
count_bytes
- 看有多个少字节值不为0
#define FF(_b) (0xff << ((_b) << 3))
/* Count the number of bytes set in the bitmap. Called fairly sporadically,
mostly to update the status screen or calibrate and examine confirmed
new paths. */
static u32 count_bytes(u8* mem) {
u32* ptr = (u32*)mem;
u32 i = (MAP_SIZE >> 2);
u32 ret = 0;
while (i--) {
u32 v = *(ptr++);
if (!v) continue;
if (v & FF(0)) ret++;
if (v & FF(1)) ret++;
if (v & FF(2)) ret++;
if (v & FF(3)) ret++;
}
return ret;
}
hash32
- 用于计算cksum,具体细节不必深究
#define ROL32(_x, _r) ((((u32)(_x)) << (_r)) | (((u32)(_x)) >> (32 - (_r))))
static inline u32 hash32(const void* key, u32 len, u32 seed) {
const u32* data = (u32*)key;
u32 h1 = seed ^ len;
len >>= 2;
while (len--) {
u32 k1 = *data++;
k1 *= 0xcc9e2d51;
k1 = ROL32(k1, 15);
k1 *= 0x1b873593;
h1 ^= k1;
h1 = ROL32(h1, 13);
h1 = h1 * 5 + 0xe6546b64;
}
h1 ^= h1 >> 16;
h1 *= 0x85ebca6b;
h1 ^= h1 >> 13;
h1 *= 0xc2b2ae35;
h1 ^= h1 >> 16;
return h1;
}
update_bitmap_score
当 fuzz 进行到后期,可能一些用例的边覆盖度,是它们祖先的边覆盖度的严格超集,因此可以考虑缩小 corpus,专注于这些超级用例(当然,其他用例不是被彻底放弃了,而是被以很大的概率忽略掉)。因此,AFL 倾向于找个 queue 中用例的子集,使得它们在覆盖所有已知边的同时尽可能小。这样的用例被认为是 favored 的。AFL 作者声称,这样形成的 favored 集合,比整个 corpus 可以小 5 到 10 倍。
然而,子集覆盖问题是 NP-完全的。AFL 必须保证速度,所以它采用了一个不准确但是很高速的算法:对于 shm 的每一个位置(这代表一条边),记录 top_rated 指针,指向 queue 中覆盖了这条边的、分数最小的那个用例。一个用例的分数等于 exec_us * len,即执行时间与文件大小的乘积。
static void update_bitmap_score(struct queue_entry* q) {
u32 i;
// 计算case的fav_factor,计算方法是执行时间和样例大小的乘积
u64 fav_factor = q->exec_us * q->len;
/* For every byte set in trace_bits[], see if there is a previous winner,
and how it compares to us. */
// 遍历trace_bits数组
for (i = 0; i < MAP_SIZE; i++)
// 不为0,表示已经被覆盖到的路径
if (trace_bits[i]) {
// 检查top_rated是否存在
if (top_rated[i]) {
/* Faster-executing or smaller test cases are favored. */
// 如果top_rated[i]的更小,则代表它的更优,不做处理,继续遍历下一个路径
if (fav_factor > top_rated[i]->exec_us * top_rated[i]->len) continue;
/* Looks like we're going to win. Decrease ref count for the
previous winner, discard its trace_bits[] if necessary. */
if (!--top_rated[i]->tc_ref) {
ck_free(top_rated[i]->trace_mini);
top_rated[i]->trace_mini = 0;
}
}
/* Insert ourselves as the new winner. */
// 设置为当前的testcase
top_rated[i] = q;
q->tc_ref++;
if (!q->trace_mini) {
q->trace_mini = ck_alloc(MAP_SIZE >> 3);
minimize_bits(q->trace_mini, trace_bits);
}
score_changed = 1;
}
}
minimize_bits
在程序分析和模糊测试中,经常使用位图(bitmap)来记录程序执行路径。位图中的每一位(bit)通常对应程序中某个特定的路径分支或代码块的执行情况。
完整位图 (trace_bits): 每一位对应某个路径,如果该位为 1,则表示程序在一次执行中触发了这个路径。 压缩位图 (trace_mini): 用于压缩存储这些路径信息,目的是减少内存占用。压缩过程中,只记录哪些路径被触发过,而不记录具体的触发次数。
- 总的来说这一步就是进行路径压缩,以更小的存储形式存到q->trace_mini中
static void minimize_bits(u8* dst, u8* src) {
u32 i = 0;
while (i < MAP_SIZE) {
if (*(src++)) dst[i >> 3] |= 1 << (i & 7);
i++;
}
}
mark_as_variable
- variable就是一个testcase但是执行结果却不一样,那么就将其保存到out_dir/queue/.state/variable_behavior/中,同时更新queue中其var_behavior成员的值
/* Mark as variable. Create symlinks if possible to make it easier to examine
the files. */
static void mark_as_variable(struct queue_entry* q) {
u8 *fn = strrchr(q->fname, '/') + 1, *ldest;
ldest = alloc_printf("../../%s", fn);
fn = alloc_printf("%s/queue/.state/variable_behavior/%s", out_dir, fn);
if (symlink(ldest, fn)) {
s32 fd = open(fn, O_WRONLY | O_CREAT | O_EXCL, 0600);
if (fd < 0) PFATAL("Unable to create '%s'", fn);
close(fd);
}
ck_free(ldest);
ck_free(fn);
q->var_behavior = 1;
}
show_init_stats
- ui部分
write_stats_file
- 更新 fuzzer_stats 文件
save_auto
- 保存 auto extras
/* Save automatically generated extras. */
static void save_auto(void) {
u32 i;
if (!auto_changed) return;
auto_changed = 0;
for (i = 0; i < MIN(USE_AUTO_EXTRAS, a_extras_cnt); i++) {
u8* fn = alloc_printf("%s/queue/.state/auto_extras/auto_%06u", out_dir, i);
s32 fd;
fd = open(fn, O_WRONLY | O_CREAT | O_TRUNC, 0600);
if (fd < 0) PFATAL("Unable to create '%s'", fn);
ck_write(fd, a_extras[i].data, a_extras[i].len, fn);
close(fd);
ck_free(fn);
}
}
find_start_position
- 若是恢复之前的 fuzz,则找到该从队列的什么位置继续
seek_to = find_start_position();
/* When resuming, try to find the queue position to start from. This makes sense
only when resuming, and when we can find the original fuzzer_stats. */
static u32 find_start_position(void) {
static u8 tmp[4096]; /* Ought to be enough for anybody. */
u8 *fn, *off;
s32 fd, i;
u32 ret;
if (!resuming_fuzz) return 0;
if (in_place_resume) fn = alloc_printf("%s/fuzzer_stats", out_dir);
else fn = alloc_printf("%s/../fuzzer_stats", in_dir);
fd = open(fn, O_RDONLY);
ck_free(fn);
if (fd < 0) return 0;
i = read(fd, tmp, sizeof(tmp) - 1); (void)i; /* Ignore errors */
close(fd);
off = strstr(tmp, "cur_path : ");
if (!off) return 0;
ret = atoi(off + 20);
if (ret >= queued_paths) ret = 0;
return ret;
}